OpenACC
Contents
OpenACC¶
Part III: OpenACC
Outline of the presentation¶
How GPU computing works
GPU programming environment
Host and Device parts of the code
GPU architecture and OpenACC thread mapping
GPU memory management
Some OpenACC parallel constructs
Compiles for OpenACC
Compiler environment for performance info
GPU computing cons and pros
HOW GPU accelerated computing works¶
Application starts and finishes running on a CPU
Some code blocks can run on GPU
Data is sent back and forth between the devices over PCIe bus
Hardware architecture and code binaries are different
CPU and GPU run cycles independently

Type of compute tasks to run on GPU¶
Single Instruction Multiple Data (SIMD) simulations can efficiently run across many light weight threads on GPU Stream Multiprocessors.
For example, vector sum:

GPU programming environments (CUDA)¶
Compiler extensions for C/C++ with CUDA and OpenCL.
For example, two types of code blocks - host and device:
// Forward declaration of the matrix sum kernel
__global__ void MatAddKernel(const Matrix, const Matrix, Matrix);
{
cudaMalloc(&device_A, size);
cudaMemcpy(device_A, A, size, cudaMemcpyHostToDevice);
}
Two sets of variables: host (A) and device (device_A).
GPU programming environments (OpenACC)¶
High level Compiler directives with OpenACC. A kind of OpenMP.
#pragma acc parallel
{
#pragma acc loop
for (i = 0; i < NX; i++) {
vecC[i] = vecA[i] * vecB[i];
}
}
One set of variables for host and device: vecC, vecB, and vecC.
Host and Device parts of a code¶
A compiled executable contains two types of binaries: host and device parts.
Data is initialized and may be computed on the CPU (host part)
CPU calls to allocate memory space for DATA on GPU (host part)
CPU sends data to the GPU (host part)
CPU invokes GPU part of the code, kernel, to execute (device part)
GPU executes its code (device part)
CPU receives data from GPU (host part)
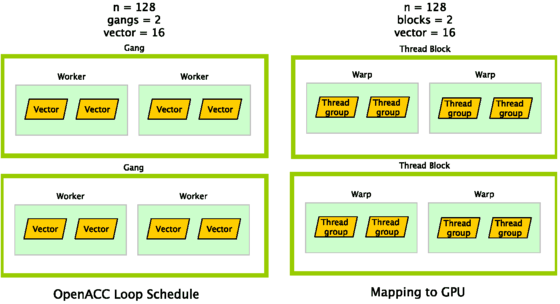
GPU threads, blocks, warps, and a grid¶
Single computing operation on GPU is done by a
thread.Threads are grouped into a
block.The number of threads in a block is defined by the code developer.
Each block performs the same operation on all its threads.
GPU employs a Single Instruction Multiple Thread (SIMT) architecture to manage and execute threads in groups of 32 called
warps.Data for each thread may be different.
The blocks are scheduled and run independently of each other.
Blocks are organized into a one-dimensional, two-dimensional, or three-dimensional
gridof thread blocks.

OpenACC - GPU thread mapping¶

The main challenge in CUDA computing is memory management¶
Data from the host arrives into the
global memory, the slowest type of memory on th GPU.One should avoid using the
global memoryfor thread computing. Copy data into theshared memory, compute, then copy results back into theglobal memory.Another challenge often happens due to noncalescent data alignment in
global memory. Data is read inwarpsof size 32. For unstructured data, it may take multiple warp cycles to load the data into theshared memory.OpenACC can’t really manage the memory, and completely relies on the compilers. Unlike CUDA, may not produce the most optimized code for the GPU architecture.
OpenACC Kernels Construct¶
The kernels construct identifies a region of code that may contain parallelism, but relies on the automatic parallelization by compilers.
#pragma acc kernels
{
for (i=0; i<N; i++)
{ y[i] = 0.0f;
x[i] = (float)(i+1);
}
for (i=0; i<N; i++)
y[i] = 2.0f * x[i] + y[i];
}
The Parallel Construct¶
The parallel construct identifies a region of code that will be parallelized across OpenACC gangs.
#pragma acc parallel loop
{
for (i=0; i<N; i++) 3
y[i] = 0.0f;
x[i] = (float)(i+1);
}
Reduction clauses¶
Like in OpenMP, there are private and shared variables, and constructs protecting shared variables and optimizing performance.
#pragma acc parallel loop reduction(max:error)
for( int j = 1; j < n-1; j++)
{
#pragma acc loop reduction(max:error)
for(inti=1;i<m-1;i++)
{
A[j][i] = 0.25*(Anew[j][i+1] + Anew[j][i-1] + Anew[j-1][i] + Anew[j+1][i]);
error = fmax( error, fabs(A[j][i] - Anew[j][i]));
}
}
Atomic clauses¶
Only one thread updates the variable at a time.
#pragma acc parallel loop
for(int i=0;i<N;i++)
{
#pragma acc atomic update
h[a[i]]+=1;
}
Data clauses¶
Data clauses give the programmer additional control over how and when data is created on and copied to or from the device. Data stays close to the thread instead of travelling back and forth to the host.
#pragma acc data create(x[0:N]) copyout(y[0:N])
{
#pragma acc parallel loop
for (i=0; i<N; i++)
{
y[i] = 0.0f;
x[i] = (float)(i+1);
}
#pragma acc parallel loop
for (i=0; i<N; i++)
y[i] = 2.0f * x[i] + y[i];
}
Loop optimization by mapping to hardware¶
The fine grain parallelization by mapping the loops onto the GPU groups of threads may result in performance increase.
Gang clause - partition the loop across gangs
Worker clause - partition the loop across workers
Vector clause - vectorize the loop
Seq clause - do not partition this loop, run it sequentially instead
Loop optimization example¶
#pragma acc parallel loop gang
for ( i=0; i<N; i++)
#pragma acc loop vector
for ( j=0; j<M; j++)
Compilers and compilation¶
Compilers supporting OpenACC in Linux:
Portland group (PGI)
pgcc -acc -ta=tesla -o code.x code.c
Nvidia HPC SDK
nvc -acc -o code.x code.c
GNU compilers (gcc 10 or newer) with Nvidia or AMD offloader libs installed
gcc -fopenacc -foffload=nvptx-none -no-pie -o code.x code.c
Scalar product example #1: sum = \((\vec{A} \cdot \vec{B})\)¶
#include <stdio.h>
#ifdef _OPENACC
#include <openacc.h>
#endif
#define NX 10240000
int main(void)
{
double vecA[NX], vecB[NX], vecC[NX];
double sum;
int i;
/* Initialization of the vectors */
for (i = 0; i < NX; i++)
{
vecA[i] = 1.0 / ((double) (NX - i));
vecB[i] = vecA[i] * vecA[i];
}
#pragma acc kernels loop
for (i = 0; i < NX; i++)
vecC[i] = vecA[i] * vecB[i];
sum = 0.0;
/* Compute the check value */
for (i = 0; i < NX; i++)
sum += vecC[i];
printf("Reduction sum: %18.16f\n", sum);
return 0;
}
Performance inquiries¶
Say, your OpenACC code,
sum_kernels.c, was compiled and can run.
nvc -acc -o sum_kernels sum_kernels.c
./sum_kernels
Output:
Reduction sum: 1.2020569031595896
How do we know if the executable is indeed utilizing the GPU?
How much processing time is spent on the GPU?
How much time is spent on host-to-device data transfer?
Nvidia HPC SDK Compiler directives for performance profiling¶
Environment variable NVCOMPILER_ACC_NOTIFY has the code to print a line of output each time it runs a kernel on the GPU:
export NVCOMPILER_ACC_NOTIFY=1
Environment variable NVCOMPILER_ACC_TIME, triggers the runtime summary of data movement between the host and GPU, and computation on the GPU:
export NVCOMPILER_ACC_TIME=1
Output example¶
launch CUDA kernel file=/home/user/OpenACC/sum_kernels.c function=main line=21 device=0 threadid=1 num_gangs=65535 num_workers=1 vector_length=128 grid=65535 block=128
Reduction sum: 1.2020569031595896
Accelerator Kernel Timing data
/home/user/OpenACC/sum_kernels.c
main NVIDIA devicenum=0
time(us): 40,518
21: compute region reached 1 time
21: kernel launched 1 time
grid: [65535] block: [128]
device time(us): total=3,477 max=3,477 min=3,477 avg=3,477
elapsed time(us): total=3,537 max=3,537 min=3,537 avg=3,537
21: data region reached 2 times
21: data copyin transfers: 10
device time(us): total=24,717 max=2,534 min=2,229 avg=2,471
23: data copyout transfers: 5
device time(us): total=12,324 max=2,523 min=2,232 avg=2,464
Compiler feedback option, -Minfo¶
nvc -acc -o sum_kernels sum_kernels.c -Minfo
Compilation output:
main:
21, Loop is parallelizable
Generating NVIDIA GPU code
21, #pragma acc loop gang, vector(128) /* blockIdx.x threadIdx.x */
21, Generating implicit copyin(vecA[:],vecB[:]) [if not already present]
Generating implicit copyout(vecC[:]) [if not already present]
Scalar product example #2: sum = \((\vec{A} \cdot \vec{B})\)¶
int main(void)
{
double vecA[NX], vecB[NX], vecC[NX];
double sum;
int i;
/* Initialization of the vectors */
for (i = 0; i < NX; i++)
{
vecA[i] = 1.0 / ((double) (NX - i));
vecB[i] = vecA[i] * vecA[i];
}
#pragma acc parallel
{
#pragma acc loop
for (i = 0; i < NX; i++)
vecC[i] = vecA[i] * vecB[i];
}
sum = 0.0;
/* Compute the check value */
for (i = 0; i < NX; i++)
sum += vecC[i];
printf("Reduction sum: %18.16f\n", sum);
return 0;
}
Output example¶
Notice quite better performance with lesser data transfer:
launch CUDA kernel file=/home/user/OpenACC/sum_parallel.c function=main line=21 device=0 threadid=1 num_gangs=800 num_workers=1 vector_length=128 grid=800 block=128
Reduction sum: 1.2020569031119110
Accelerator Kernel Timing data
/home/user/OpenACC/sum_parallel.c
main NVIDIA devicenum=0
time(us): 432
21: compute region reached 1 time
21: kernel launched 1 time
grid: [800] block: [128]
device time(us): total=30 max=30 min=30 avg=30
elapsed time(us): total=364 max=364 min=364 avg=364
21: data region reached 2 times
21: data copyin transfers: 2
device time(us): total=268 max=141 min=127 avg=134
26: data copyout transfers: 1
device time(us): total=134 max=134 min=134 avg=134
GPU computing cons and pros¶
Pros:
computing power for Single Instruction Multiple Data tasks thanks to available many GPU threads.
Many applications are already developed and ported into CUDA and OpenACC.
Cons:
Not beneficial for non SIMD computing.
Nontrivial programming in CUDA.
Relatively easy to program in OpenACC, but the performance may not be optimal.
Hardware - compatibility and dependency on Nvidia support. Relatively old GPU hardware is no longer supported by latest Nvidia drives and library releases.
OpenACC won’t run on Nvidia hardware without Nvidia drivers and libraries.